
数据结构之散列表
[TOC]
散列
散列表是元素集合,其中的元素以一种便于查找的方式存储。散列表中的每个位置通常被称为槽,其中可以存储一个元素。

散列函数将散列表中的元素与其所属位置对应起来
例如:取余函数%11
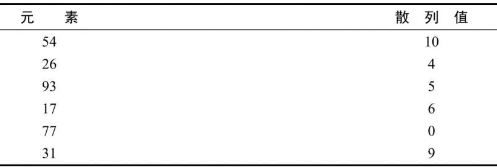
将计算出的散列值插入散列表的对应位置

**载荷因子(λ)**:散列表的占用率
散列冲突:元素77在散列表的0位置,如果再来一个元素44,它的散列值也是0。将两个元素都放入同一个槽,这种情况被称作冲突,也叫“碰撞”
完美散列函数:给定一个元素集合,能将每个元素映射到不同的槽,这种散列函数称作完美散列函数。
如果元素已知,并且集合不变,那么构建完美散列函数是可能的。
不幸的是,给定任意一个元素集合,没有系统化方法来保证散列函数是完美的。
散列函数要求:冲突数最少,计算方便,元素均匀分布于散列表中。
构建完美散列函数方法:
- 增大散列表:使之能容纳每一个元素,这样就能保证每个元素都有属于自己的槽,元素多时候不可取
散列函数一定要高效,以免它成为存储和搜索过程的负担。如果散列函数过于复杂,计算槽编号的工作量可能比在进行顺序搜索或二分搜索时的更大,这可不是散列的初衷。
- 举例:字符串
1 | # 字符串:unicode编码求和,再取余数 |
散列冲突
当两个元素被分到同一个槽中时,必须通过一种系统化方法在散列表中安置第二个元素。这个过程被称为处理冲突。
再散列泛指在发生冲突后寻找另一个槽的过程。
- 一种方法是在散列表中找到另一个空槽,用于放置引起冲突的元素。
简单的做法是从起初的散列值开始,顺序遍历散列表,直到找到一个空槽。注意,为了遍历散列表,可能需要往回检查第一个槽。这个过程被称为开放定址法,它尝试在散列表中寻找下一个空槽或地址。由于是逐个访问槽,因此这个做法被称作线性探测。
在这个散列表中,如果我们添加新元素44,它的散列值是0,但0已有元素77,根据线性探测,我们将把44存储在下一个None位置,也就是1中,如果再添加新元素55,则会放在2中。
当然,查找会产生额外开销,比如找55时,我们根据散列值0查到了77,值不匹配,说明可能存在散列冲突,随后进行线性搜索,1位置44,不匹配,2位置55,返回True。如果查找不存在的元素66,当我们搜索的3位置是个None时,也就是遇到空槽,就说明元素不存在,返回False。
线性探测有个缺点,那就是会使散列表中的元素出现聚集现象。也就是说,如果一个槽发生太多冲突,线性探测会填满其附近的槽,而这会影响到后续插入的元素。
扩展线性探测,不再依次顺序查找空槽,而是跳过(skip)一些槽,这样做能使引起冲突的元素分布得更均匀。“跨步”(skip)的大小要能保证表中所有的槽最终都被访问到,否则就会浪费槽资源。所以建议散列表的大小为素数
平方探测是线性探测的一个变体,它不采用固定的跨步大小,而是通过再散列函数递增散列值。如果第一个散列值是h,后续的散列值就是h+1、h+4、h+9、h+16
- 另一种处理冲突的方法是让每个槽有一个指向元素集合(或链表)的引用
链接法允许散列表中的同一个位置上存在多个元素。发生冲突时,元素仍然被插入其散列值对应的槽中。不过,随着同一个位置上的元素越来越多,搜索变得越来越困难。
实现映射抽象数据类型
字典是存储键-值对的数据类型。键用来查找关联的值,这个概念常常被称作映射。
python中的字典的存储结构就是由散列表实现的,这里通过映射类型进行说明。
映射抽象数据类型定义如下。它是将键和值关联起来的无序集合,其中的键是不重复的,键和值之间是一一对应的关系。映射支持以下操作。
- Map():创建一个空的映射,它返回一个空的映射集合。
- put(key, val):往映射中加入一个新的键-值对。如果键已经存在,就用新值替换旧值。
- get(key):返回key对应的值。如果key不存在,则返回None。
- del:通过del map[key]这样的语句从映射中删除键-值对。
- len():返回映射中存储的键-值对的数目。
- in:通过key in map这样的语句,在键存在时返回True,否则返回False。
1 | # 映射抽象数据类型:键值对字典 |
散列搜索算法
在最好情况下,散列搜索算法的时间复杂度是O(1),即常数阶。然而,因为可能发生冲突,所以比较次数通常不会这么简单
在分析散列表的使用情况时,最重要的信息就是载荷因子λ。从概念上来说,如果λ很小,那么发生冲突的概率就很小,元素也就很有可能各就各位。如果λ很大,则意味着散列表很拥挤,发生冲突的概率也就很大。
 wechat
wechat
